当前位置:首页>新闻中心>科研进展
科研进展
都市所科研团队成果获发明专利
来源:智能园艺机器人团队
发布时间:2024-11-22
作者:马伟
点击数:
智能园艺机器人团队首席科学家的一项科研成果获得发明专利授权,(专利号:202211310268.6)。
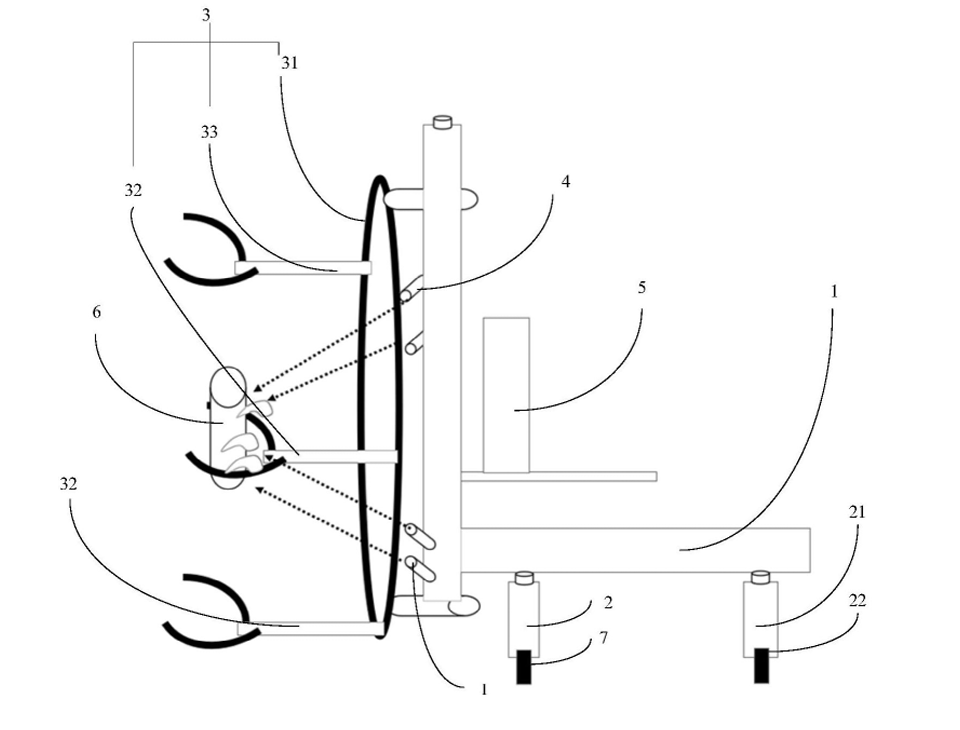
专利名称为:“一种旋转识别采收机器人装置及方法”,该专利针对当前食用菌和药材在采收过程主要依赖人工操作的问题,通过结合旋转识别技术与采收机器人技术,构建了由安装架、行走装置、采收装置、识别装置和控制器组成的自动化采收系统。其中,采收装置尤为关键,它通常包括采收轨道、采收机械臂和摘取机械臂。采收机械臂可以在采收轨道上移动,用于抓取栽培袋或待采收的物品,而摘取机械臂则用于摘取或切割这些物品。在采摘过程中,机器人首先通过识别装置找到目标物品,然后行走装置将机器人移动到合适的位置。接着,采收机械臂和摘取机械臂协同工作,抓取并摘取目标物品。整个过程中,控制器都在不断地接收来自识别装置的反馈,以确保采摘的准确性和效率。
该技术以其高效、准确和灵活的采摘能力实现了食用菌和药材的精准高效采收,显著降低了人力成本。为农业自动化提供了有力的技术支持。(信息员 何嘉晨)