








当前位置:首页>新闻中心>科研进展
科研进展
[科研进展]基于EDM的温室穴盘苗移栽机取苗机械手设计与试验
穴盘育苗技术在温室生产中应用规模日益广泛,当育苗盘中的幼苗生长至一定阶段,需要将其移植到低密度穴盘中,以满足钵苗生长发育需求。移栽苗能有效缩短作物生长发育周期,提高产量。但人工移栽工作强度大、效率低、成本高,且栽植质量无法保证,所以机械化移栽是未来的发展趋势。现有移栽机取苗器结构设计复杂,体积繁重,对基质完整性保持能力差,导致移栽苗成活率不高。
针对这一科学问题,近期,中国农业科学院都市农业研究所智能园艺机器人团队设计了一种新型针式取苗器,并基于EDEM离散元中的 ECM 粘结力弹塑性接触模型,建立了多种不同材料属性的复杂颗粒模型来模拟真实育苗基质,进而研究钢针与基质的作用关系,通过该方法对取苗器的技术参数进行优化。相关成果发表在《Agronomy》期刊上(JCR三区,影响因子3.41)。团队首席科学家马伟博士为论文通信作者,科研助理田志伟为论文第一作者。该研究得到中国农业科学院科技创新工程项目(ASTIP-2020-007)、成都农业科技中心地方财政专项资金项目(NASC2020KR05)以及中国农业科学院基本科研业务费专项(Y2021XK08)的支持。
研究中提出的取苗器移栽时基质最大完整率为87.34%,平均值为76.05%,该结果优于同类研究。童俊华等提出的铲形末端执行器在理想情况下获得得到的基质完整率在63.6%~78.8%浮动,平均完整率为70.8%。Jin X等设计的取苗器基质完整率最大值83.45%。研究结果对提高钵苗移栽机作业质量和取苗器设计具有参考意义。
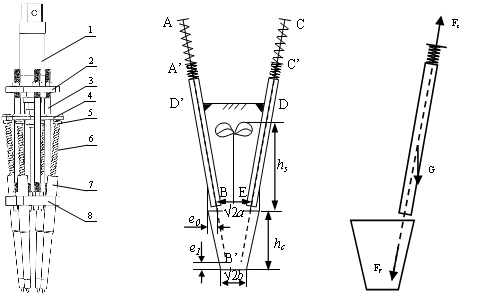
1.气缸 2.气缸座 3.螺杆 4.压板 5.钢针 6.弹簧 7.导管 8.固定板
图1 新型针式取苗器设计及运动学分析
此外,基于离散元(EDM)仿真结果与实际移栽过程中幼苗基质的表现情况一致,表明基于离散元方法解决钢针-离散基质交互问题是可行的。

图2 基于EDEM的钵苗抓取仿真及优化
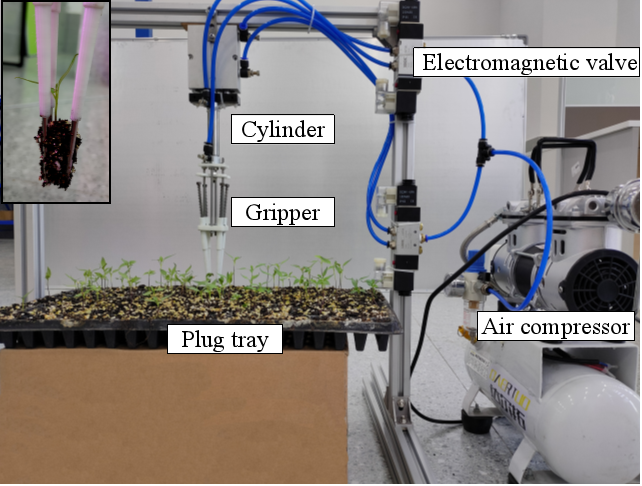
图3.取苗器抓取测试平台
对不同的基质块所对应的钵苗根系对比还发现,钵苗根系越发达取苗器抓取的基质越多。发达的根系在孔穴中延伸的空间较大,渗透范围广,对基质起固定作用,有效提高了基质块内聚力,抓取时不易破损。从侧面说明,温室穴盘苗移栽机械化发展应注重农机农艺相融合,在研发移栽机械的同时应采用科学的栽培和管理技术,确保移栽苗健莊和长势均衡。

图4.钵苗的根系比较。 (a)行图片是机械手抓到的基质,(b)行图片是这些基质对应的钵苗根系。
参考文献:Zhiwei, T.; Wei, M.;Qichang, Y.; Sen, Y.; Xiangyu, G.;Famin, D. Design and Experiment of Gripper for Greenhouse PlugSeedling Transplanting Based on EDM. Agronomy 2022, 12, 1487. https://doi.org/10.3390/agronomy12071487