




近期,设施农业人工智能控制团队在猕猴桃果实空间分布特征及采摘路径规划优化研究中取得重要进展。研究基于多地猕猴桃园实测数据,揭示了果实在自然生长状态下的空间聚集规律,并构建了融合果实分布特征的路径规划策略,为智能采摘装备在复杂环境中的高效作业提供了新思路。
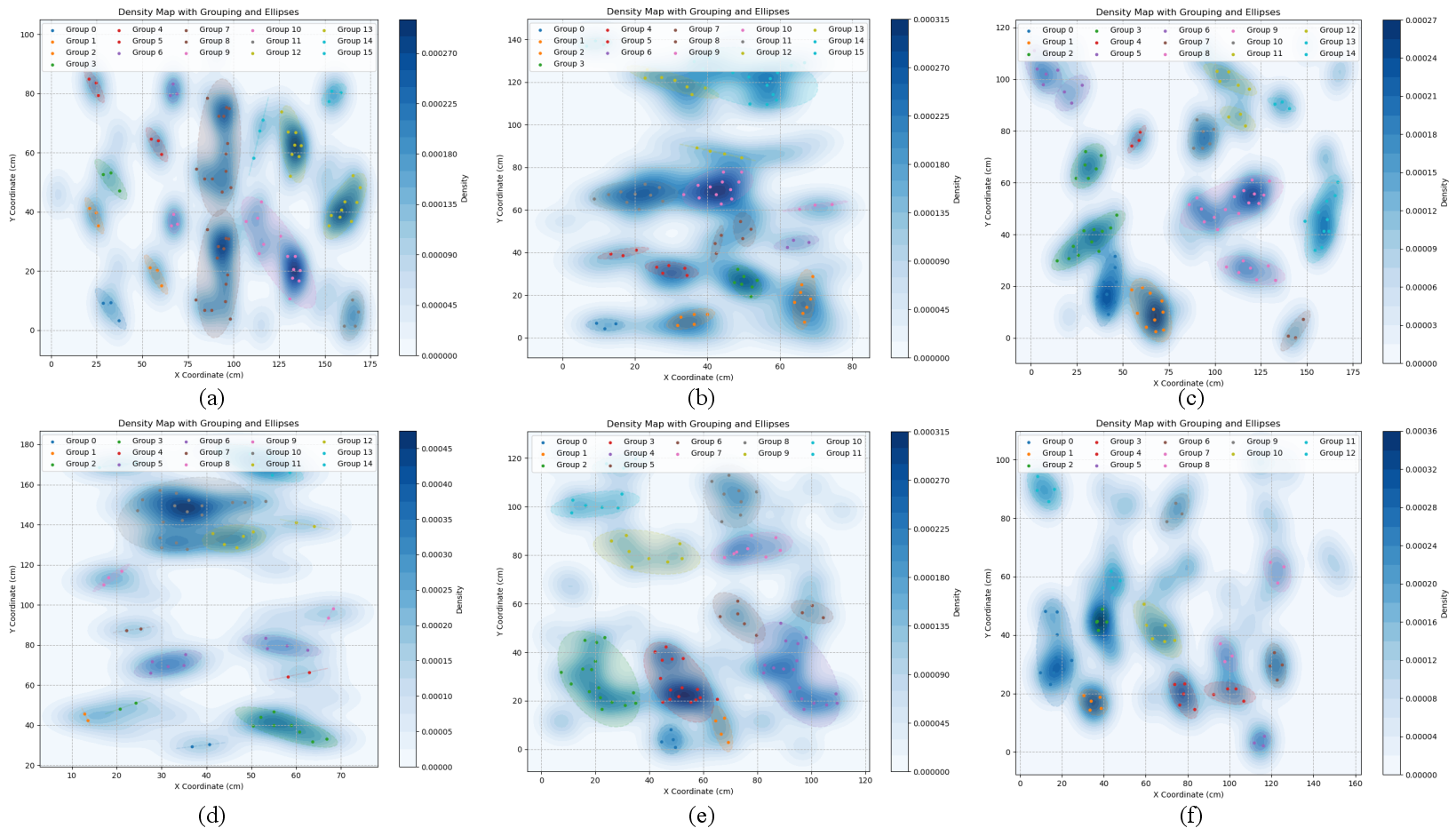
研究团队利用 Ripley’s K 函数和核密度估计(KDE)方法,对六个典型猕猴桃果园区域的果实分布进行了系统分析。结果表明,果实呈现出明显“集群”分布模式,每个区域形成约 11~15个果群。基于该特征提出了结合全局路径规划与果群局部优化的双模式路径规划方法,并采用多种经典算法(包括A*、遗传算法、蚁群算法等)进行仿真测试。结果显示,在引入果群分布特征后,路径长度至少缩短15.3%,转向角度和计算时间显著减少,采摘路径更为平滑稳定。该方法显著提升了采摘机器人的路径执行效率和作业连续性。
该研究成果发表在《Smart Agricultural Technology》期刊,为果园采摘机器人在空间异质性强的丘陵环境中实现高效作业提供了理论与算法支持,对推动智能果园装备的自主感知与路径决策具有重要意义。下一步,团队将结合真实果园采摘平台,验证算法在实际环境下的鲁棒性与节能效果,进一步推进成果的工程化应用。
原文链接:https://doi.org/10.1016/j.atech.2025.101508