

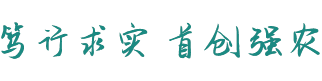





近日,都市所马伟研究员在《Agronomy》国际期刊上发表文章,系统探讨了猕猴桃等藤架类水果采摘机器人的关键技术与发展方向。研究围绕视觉系统、机械臂系统、末端执行器以及移动平台等方面,深入剖析了当前机器人采摘所面临的技术瓶颈与可能的创新路径。文章指出,尽管深度学习技术显著提升了果实的识别精度与抗干扰能力,但在动态环境中的定位鲁棒性、跨品种适应性以及系统成本控制等方面,仍然存在制约产业化的关键难题。
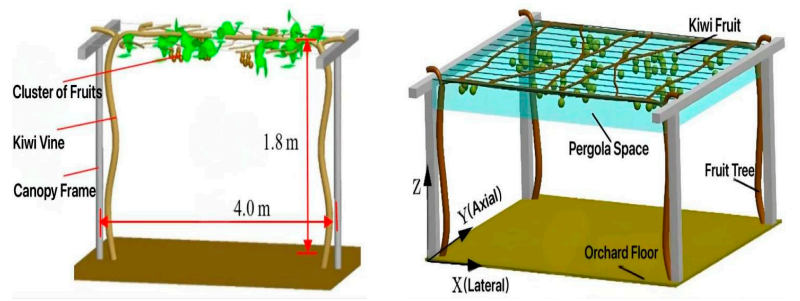
在具体技术层面,末端执行器已能实现数秒内的高效采摘,成功率超过90%,展现出良好的作业效率。然而,果实在采摘过程中的物理损伤控制、密集果簇条件下的精准分离与抓取,仍是当前执行器设计中的核心挑战。此外,不同品种果实的形态差异也对末端执行器的通用性提出了更高要求,亟需在结构与控制策略上进一步优化。
展望未来,该研究强调应系统推进轻量化模型、多模态传感与自适应算法等关键技术的融合创新。通过多机协同作业与参数自学习机制,逐步实现从单点、单机作业到全果园自主运行的系统跨越。设施农业人工智能团队多年来持续聚焦于农机薄弱环节,致力于构建适用于我国主流藤架结构的采摘技术体系,为推动采摘机器人从理论研发迈向产业化应用,提供了农艺与农机深度融合、品种与装备协同优化的新思路。
文章链接:https://www.mdpi.com/2073-4395/15/11/2499
